

Gegenseitige Lage Punkt-Strecke und Punkt-Gerade
In der analytischen Geometrie behandelst du Geraden und Punkt. Dabei untersuchst du die relative Lage eines Punktes zu einer Geraden oder auch Strecke.
Jetzt mit Spaß die Noten verbessern
und sofort Zugriff auf alle Inhalte erhalten!
30 Tage kostenlos testenInhaltsverzeichnis zum Thema
Punkte
Ein Punkt in der Ebene $\mathbb{R}^{2}$ oder im Raum $\mathbb{R}^{3}$ ist gegeben durch seine Koordinaten. So ist der Punkt $A(1|2)$ ein Punkt in der Ebene, er hat zwei Koordinaten, nämlich eine $x$- und eine $y$-Koordinate. Diese werden in mancher Literatur auch als $x_{1}$- und $x_{2}$-Koordinate bezeichnet. Der Punkt $B(2|2|4)$ liegt im Raum. Er hat drei Koordinaten, nämlich eine $x$-, eine $y$- sowie eine $z$-Koordinate. Auch hier wird oft die Schreibweise $x_{1}$, $x_{2}$ sowie $x_{3}$ verwendet.
Wir schauen uns im Folgenden den Raum $\mathbb{R}^{3}$ an. Solltest du Aufgaben in der Ebene bearbeiten müssen, läuft alles ganz genauso wie hier beschrieben, nur ohne $z$-Koordinate.
Geraden im Raum
Geraden sind entweder durch einen Punkt und einen Vektor oder durch zwei Punkte gegeben.
Eine Parametergleichung sieht so aus:
$g:\vec x=\vec a+r\cdot \vec u$
Dabei ist
- $\vec x$ ein Vektor, der auf einen beliebigen Punkt der Geraden zeigt,
- $\vec a$ ein Vektor, der auf einen gegebenen Punkt der Geraden zeigt, der Stützvektor,
- $\vec u$ der Richtungsvektor und
- $r\in\mathbb{R}$ ein Parameter.
Ein Punkt kann entweder auf einer Geraden liegen oder nicht: In dem folgenden Bild liegt $A$ auf der Geraden und $B$ nicht.
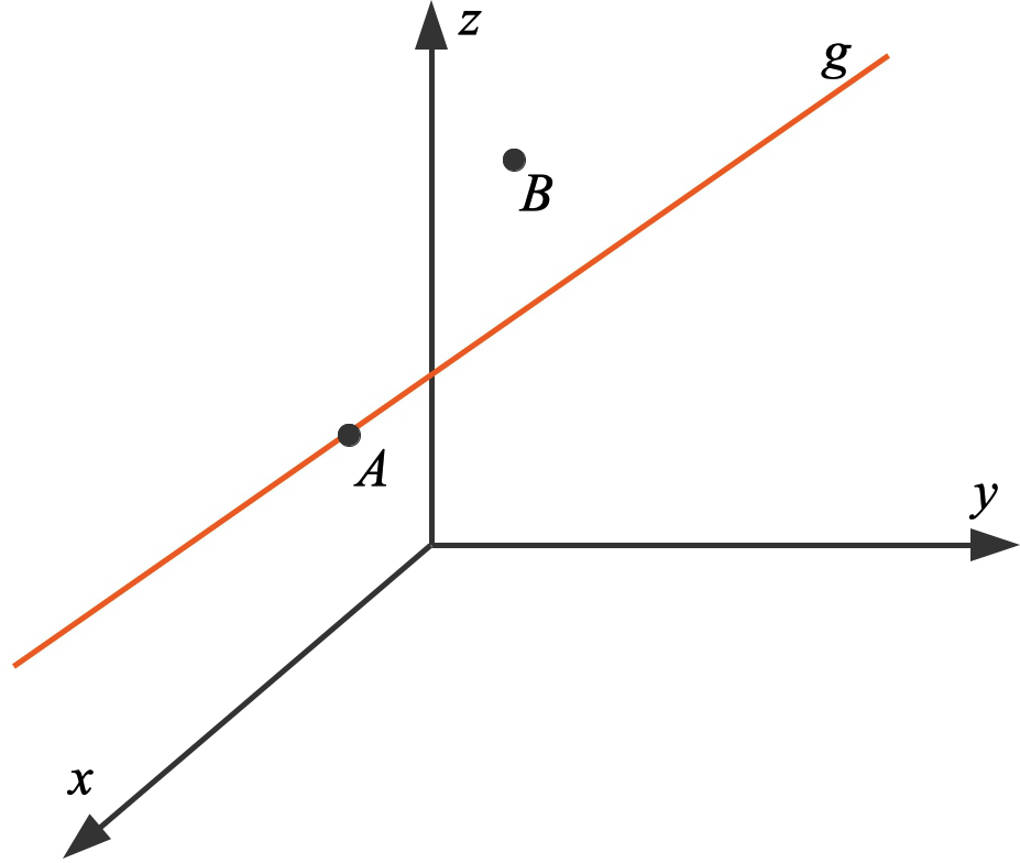
Wenn ein Punkt nicht auf einer Geraden liegt, kannst du den Abstand dieses Punktes zu der Geraden berechnen.
Punktprobe
Um zu prüfen, ob ein Punkt auf einer Geraden liegt, führst du eine Punktprobe durch. Du setzt hierfür den Ortsvektor des Punktes für $\vec x$ in die Geradengleichung ein. So erhältst du ein lineares Gleichungssystem mit drei Gleichungen und einer Unbekannten, dem Parameter.
Wir schauen uns dies an einem Beispiel an:
$g:\vec x=\begin{pmatrix} 1\\2\\1 \end{pmatrix}+r\cdot \begin{pmatrix} 1\\-1\\3 \end{pmatrix}$
Prüfe, ob der Punkt $A(2|2|3)$ auf dieser Geraden liegt. Setze den Ortsvektor von $A$ für $\vec x$ ein:
$\begin{pmatrix} 2\\2\\3 \end{pmatrix}=\begin{pmatrix} 1\\2\\1 \end{pmatrix}+r\cdot \begin{pmatrix} 1\\-1\\3 \end{pmatrix}$
Schau dir nun von oben nach unten die Gleichungen an:
$\begin{array}{rll} \text{I:} & 2 &=& 1+r \\ \text{II:} & 2 &=& 2-r \\ \text{III:} & 3 &=& 1+3r \end{array}$
Die Gleichung $\text{I}$ liefert $r=1$ und die Gleichung $\text{II}$ führt zu $r=0$.
Da du zwei verschiedene Lösungen für $r$ bekommst, ist das Gleichungssystem nicht lösbar. Der Punkt $A$ liegt also nicht auf der Geraden. Wenn er auf der Geraden liegt, löst ein Wert für $r$ alle drei Gleichungen.
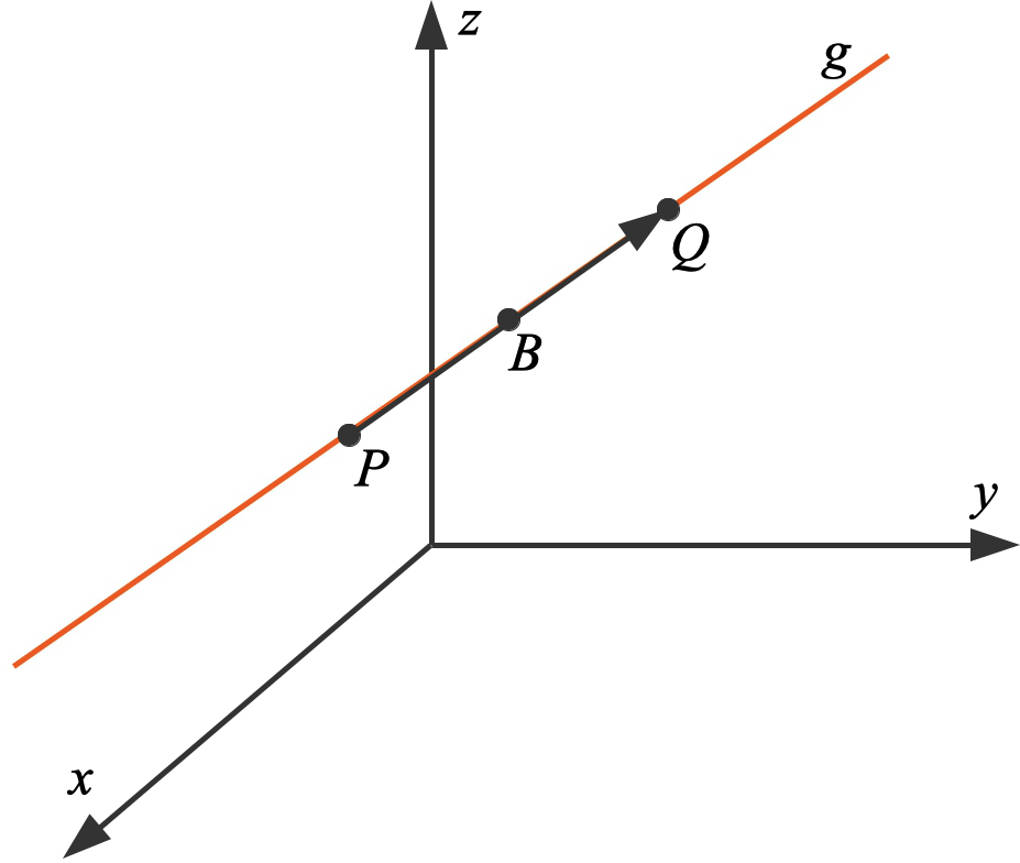
Dies schauen wir uns am Beispiel einer Zwei-Punkt-Gleichung einer Geraden durch die Punkte $P(2|1|4)$ sowie $Q(6|3|0)$ an. Der Richtungsvektor der Geraden ist der Verbindungsvektor der beiden Punkte und der Stützvektor der Ortsvektor eines der beiden Punkte:
$g:\vec x=\begin{pmatrix} 2\\1\\4 \end{pmatrix}+r\cdot \begin{pmatrix} 4\\2\\-4 \end{pmatrix}$
Nun sollst du die relative Lage des Punktes $B(4|2|2)$ prüfen. Die Punktprobe führt zu $r=0,5$. Der Punkt liegt also auf der Geraden.
Wir schauen uns die Bedeutung des Parameters $r$ bei einer Zwei-Punkt-Gleichung etwas genauer an: Wenn du wie in diesem Beispiel den Ortsvektor des Punktes $P$ als Stützvektor und den Verbindungsvektor von diesem Punkt aus zu dem anderen Punkt als Richtungsvektor verwendest, kannst du feststellen:
- $r=0$ führt zu dem Punkt $P$.
- $r=1$ führt zu dem Punkt $Q$.
- $0 < r < 1$ bedeutet, dass der Punkt auf der Strecke $\overline{PQ}$ liegt.
In dem obigen Beispiel liegt der Punkt genau in der Mitte der Strecke:
Abstandsberechnung
Wie bereits erwähnt, kannst du für einen Punkt $A$, welcher nicht auf einer Geraden liegt, den Abstand dieses Punktes zu der Geraden berechnen. Dabei kannst du verschiedene Vorgehensweisen behandeln:
- Du verwendest das Lotfußpunktverfahren: Mit Hilfe einer Ebene, welche senkrecht zu der betrachteten Geraden $g$ liegt und den Punkt $A$ enthält, welcher nicht auf der Geraden liegt, kannst du den Lotfußpunkt bestimmen. Dies ist der Schnittpunkt der Hilfsebene mit der Geraden. Der gesuchte Abstand ist dann der Abstand des Punktes $A$ zu diesem Schnittpunkt.
- Du kannst den Verbindungsvektor von $A$ zu einem beliebigen Punkt der Geraden aufstellen. Darin kommt der Parameter $r$ vor. Nun bestimmst du den Parameter $r$ so, dass dieser Verbindungsvektor senkrecht zu dem Richtungsvektor der Geraden steht.
- Schließlich kannst du auch den Abstand von $A$ zu einem beliebigen Punkt der Geraden bestimmen. Dieser hängt von dem Parameter $r$ ab. Da man in der Mathematik unter dem Abstand immer den kürzesten Abstand versteht, bestimmst du nun den minimalen Abstand. Hierfür verwendest du den quadrierten Abstand in Abhängigkeit von $r$ und leitest diesen ab. Die erste Ableitung muss $0$ sein.
Das mittlere Verfahren schauen wir uns abschließend noch für das anfängliche Beispiel mit dem Punkt $A$ und der Geraden $g$ an.
Bestimme den Verbindungsvektor
$\vec{P_{g}A}=\begin{pmatrix} 1-r\\r\\2-3r \end{pmatrix}$
Bestimme $r$
Der obige Vektor muss senkrecht zu dem Richtungsvektor sein. Zwei Vektoren sind senkrecht, wenn deren Skalarprodukt gleich $0$ ist. Dies führt zu der folgenden Gleichung:
$1-r-r+3(2-3r)=0~\Leftrightarrow~7-11r=0~\Leftrightarrow~r=\frac{7}{11}$
Nun setzt du diesen Wert für $r$ in die Geradengleichung ein und erhältst den Punkt mit dem kürzesten Abstand zu $A$. Der Abstand von $A$ zu der Geraden ist dann der Abstand der beiden Punkte zueinander.


Alle Arbeitsblätter zum Thema
Arbeitsblätter zum Thema
Gegenseitige Lage Punkt-Strecke und Punkt-Gerade (2 Arbeitsblätter)
 Gegenseitige Lage Punkt-Gerade und Punkt-Strecke
Gegenseitige Lage Punkt-Gerade und Punkt-Strecke
 Abstand Punkt-Gerade im Raum (IR³)
Abstand Punkt-Gerade im Raum (IR³)
9.966
sofaheld-Level
6.600
vorgefertigte
Vokabeln
8.314
Lernvideos
38.636
Übungen
33.706
Arbeitsblätter
24h
Hilfe von Lehrkräften

Inhalte für alle Fächer und Klassenstufen.
Von Expert*innen erstellt und angepasst an die Lehrpläne der Bundesländer.
Testphase jederzeit online beenden
Beliebteste Themen in Mathematik
- Römische Zahlen
- Prozentrechnung
- Prozentrechnung - Übungen
- Primzahlen
- Geometrische Lagebezeichnungen
- Was ist eine Ecke?
- Rechteck
- Was ist eine Gleichung?
- Pq-Formel
- Satz des Pythagoras – Übungen
- Binomische Formeln
- Graphisches Ableiten – Übungen
- Trapez
- Flächeninhalt – Übungen
- Volumen Zylinder
- Potenzgesetze – Übungen
- Umfang Kreis
- Zehnerzahlen vergleichen und ordnen – Übungen
- Quadrat
- Zahlen sortieren – Übungen
- Division
- Binomische Formeln – Übungen
- Raute
- Brüche umwandeln Übungen
- Parallelogramm
- Ungleichungen – Übungen
- Polynomdivision
- Zahlen bis 1000 ordnen – Übungen
- Was Ist Eine Viertelstunde
- Terme mit Variablen aufstellen – Übungen
- Prisma
- Die Grundrechenarten – Übungen
- Mitternachtsformel
- Äquivalenzumformung
- Grundrechenarten Begriffe
- Größer Kleiner Zeichen
- Dreiecksarten
- Punkt-vor-Strich und Klammern-zuerst-Regel
- Aufbau von Dreiecken
- Quader
- Zahlen runden – Übungen
- Satz Des Pythagoras
- Ziffern und Stellenwerte – Übungen
- Dreieck Grundschule
- Koordinatensystem – Übungen
- Erste Binomische Formel
- Kreis
- Trigonometrie
- Trigonometrische Funktionen
- Standardabweichung








